Motivací pro takový měnič je možnost dodávat výkon panelů přímo do meziobvodu střídače pomocí jednoduchého boost měniče pracujícího při malých proudech a malém poměru vstupního a výstupního napětí. Je to výhodné v případě, kdy napětí panelů je už bližší napětí meziobvodu než napětí baterií. Při použití nízkonapěťové 48V baterie není výhodné přenášet plný výkon z panelů do střídače přes toto nízké napětí při velkých proudech.
Typické zapojení obsahuje boost měnič pro panely, střídač a obousměrný DC/DC měnič pro změnu napěťové hladiny meziobvodu na baterii. Toto zapojení se používá v různých obdobách, zde uvedu nejjednodušší variantu.
Boost měnič pro panely nemusí být synchronní, jednoduchý s diodou D1 se snáze řídí. (Synchronní by musel být s MOSFET tranzistorem, ne IGBT)
Střídač je dvoufázový se dvěma samostatnými tlumivkami a filtračními kondenzátory. To umožňuje využít tříúrovňové řízení a snížit tak spínací ztráty a ztráty v jádrech tlumivek na polovinu. Unipolární řízení není možné použít, protože mínus meziobvodu je vyveden na panely.
Při použití unipolární modulace pro jednofázový výstup (uzemnění druhého výstupu) v tomto zapojení dojde k tomu, že celý systém solárních panelů bude vůči zemi plavat na obdélníkovém průběhu s amplitudou 350V. To je bohužel případ levnějších hybridních měničů na trhu. Poznají se tak, že mají uvnitř pouze jednu tlumivku střídače. Strmé hrany způsobují kapacitní proud mezi rámem panelu a křemíkovými články, které mohou degradovat.
Zde s dvoufázovým výstupem je na panelech jen případný stejnosměrný offset. Navíc můžeme zapojení doplnit měřením napětí mezi zemí a mínusem meziobvodu, a zajistit tak jednoduchou kontrolu izolace. Když se libovolný z výstupů AC1, AC2, +Panelů nebo +Baterek spojí se zemí bude příslušné napětí měřitelné na děliči a měnič se okamžitě vypne. Měřící odporový dělič R1, R2 v klidu drží mínus panelů na potenciálu blízkému zemi.
Obousměrný DC/DC měnič s transformátorem se od jednosměrného liší pouze osazením můstku z IGBT místo diod. Mínus baterek nemusí být spojen s mínusem meziobvodu pokud je potřeba galvanická izolace, ale pokud baterie není uzemněná, není důvod ji izolovat od zbytku zapojení. Kvůli rozptylu trafa není vhodné řídit tranzistory primární a sekundární strany synchronně (opět případ levnějších měničů na trhu). Výhodnější z hlediska ztrát naprázdno je detekovat směr toku výkonu a spínat výstupní stranu s menší střídou než vstupní. Při použití IGBT to v režimu z baterie do meziobvodu postrádá smysl, ale obráceně se tak zajistí synchronní usměrnění, tedy zmizí úbytek na substrátových diodách MOSFET tranzistorů na straně baterie. Baterie mají obvykle nízký rozsah napětí mezi nabitým a vybitým stavem, není proto potřeba DC/DC měnič regulovat, stačí regulovat až hloubku modulace střídače.
Schema
Schema je vlastně 6 polomostů a jeden dolní spínač pro boost měnič. Řízení opět obstarává STM32F103CT, kde už tedy je konečně větší část pinů využitá ale na řízení takových měničů v pohodě stačí. Pomocné napájení je zapojeno z baterie pomocí třísvorkových spínaných DC/DC. Samotné řízení bere ve vypnutém stavu (v noci) z baterek 0,35W.
Spotřeba naprázdno celého měniče potom v režimu z baterek (ve dne) je 6,5W.
To je dosaženo zejména tříúrovňovým řízením střídače, a také řízením střídy DC/DC, který přestože nemůže řídit napětí, tak ale může snížit sycení jader tím, že při malém odběru sníží střídu na primární straně a sekundární IGBT nespíná vůbec.
Naopak v zátěži jede vstupní H-most se střídou 48% a výstupní usměrňovač 40% (podle směru toku výkonu) kvůli rezervě pro zpoždění proudu za napětím vlivem rozptylové indukčnosti trafa. Výhoda jinak zbytečného synchronního spínání IGBT je lepší dynamika při přecházení z vybíjení do nabíjení, kdy mírně vzroste napětí meziobvodu.
Napětí meziobvodu a baterie jsou hlídány HW ochranou, která zablokuje spínání boost tranzistoru měniče solárů (jediný zdroj, který může toto přepětí způsobit)
Všechny H-mosty jsou doplněny bočníky pro měření proudu a rychlou SW ochranu. U střídače je převod ADC spouštěn při sepnutí příslušného tranzistoru a v případě nadproudu MCU zajistí vypnutí do 5us od sepnutí, což je v případě robustní struktury IGBT tranzistorů dostatečně včas. Zapojení tak vydrží i současné sepnutí obou tranzistorů polomostu při plném napětí meziobvodu.
Už několikrát jsem si říkal, že je to naposledy, co dávám do takového měniče IR2110, ale protože v předchozí verzi HF měniče fungují už několik let, dal jsem i sem. Bohužel s rychlejšími IGBT SGH80N60 se objevily problémy se špičkami napětí na gate vlivem kapacity Gate-Kolektor. Uvažoval jsem osadit stejné jako v HF měniči, tedy staré pomalé STGW30NC120, kde tyto problémy nebyly, ale nakonec jsem zapojení doplnil diodami přes Rg a externími kondenzátory Gate-Emitor 1nF resp. 10nF, které naštěstí ještě nezpůsobují zvýšení ztrát naprázdno. Vhodnější do příští verze by bylo vypínat tranzistory záporným napětím.
RC článek na výstupu střídače jako i kondenzátory přes tranzistory DC/DC měniče zlepšují tvar průběhů při přepínání tranzistorů.
Klasickým velkým problémem střídačů je připojování spotřebičů se spínanými zdroji, NTB adaptér vezme špičku 32A (To odpovídá 10R softstartovacímu odporu), zapnutí zásuvky s PC sestavou 44A. Paradoxně rozběh motorů je menší problém. Výhodnější je větší indukčnost tlumivek střídače a větší kondenzátor na výstupu. Ten sice způsobuje tok jalového výkonu skrz můstek střídače i při chodu naprázdno, ale ztráty příliš nezvyšuje. Oproti schematu jsem na výstup přidal 6u8 PP X2 svitek.
Zamontování ve skříni
Vrchní strana desky, elektrolyty jsou zespodu
Dvě trafa DC/DC měniče jsou zapojeny sérioparalelně
Tlumivky střídače a boost měniče
Průběh na gate tranzistoru střídače
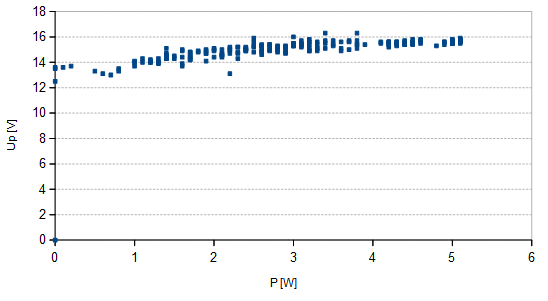
Průběh denní spotřeby ze střídače a teplota desky měniče uzavřeného uvnitř hliníkové skříně.
Závěr:
Měnič je v provozu několik dnů, stále ladím SW. Spolupráce s ostatními měniči, což byla hlavní motivace, funguje. Ráno než se nabijí baterky na zvolené napětí 51,5V, tak má měnič plnou kontrolu nad panely. Potom nechá měnič vylézt napětí panelů nad 150V a řízení převezme měnič pro bojler. Baterka se dále nabíjí až do 52,5V jen z menšího systému s MPPT měničem z 60V. Večer naopak nejprve výkon spadne na 60V panelech a měnič opět převezme řízení nad svými panely a napájí z nich střídač. Postupně narůstající chybějící výkon odebírá DC/DC měnič z baterie.
Když se pozdě večer vypne poslední odběr ze střídače, všechny měniče se vypnou a FSM automat čeká na ráno na nárůst napětí na panelech, aby zase postupně nahodil DC/DC, střídač a boost z panelů.
Při vypnutí střídače odpadne relé umístěné na jeho výstupu a spotřebiče, které musí běžet i jindy než ve dne se přepnou na síť.
22.4.2022: Měnič je po dokončení ladění trvale v provozu už 3 měsíce bez poruchy. Napájí ledničku, počítač, elkový zesilovač a sušák na ručníky. Na výkonnější spotřebiče jsem nakonec pořídil z Německa starší Studer střídače, které za cenu nového Axpertu mají 14W klidovou spotřebu (tolik potřebuje Axpert jenom na displej) a v zátěži jsou studené a tiché, žádný horký vysavač. (Jak je možné, že měnič s plechovým trafem dosahuje menší klidové spotřeby a vyšší účinnosti v zátěži než "moderní" měnič s vysokofrekvenčními trafy?)
Ve stavbě je obdobný měnič ale už bez střídače jen boost a DC/DC.